Arten und Funktionsweise
Vibrotaktiles Feedback
Zum Erzeugen eines vibrotaktilen Feedbacks wird das Interface mit verschiedenen Vibrationselementen ausgestattet, sogenannten Aktuatoren. Durch die Vibrationen entsteht auf der Haut ein Gefühl von Rauheit. Bei starker Vibration entsteht zudem der Eindruck, dass der jeweilige Bildschirmbereich weiter aus dem Display heraussteht als andere Bereiche.
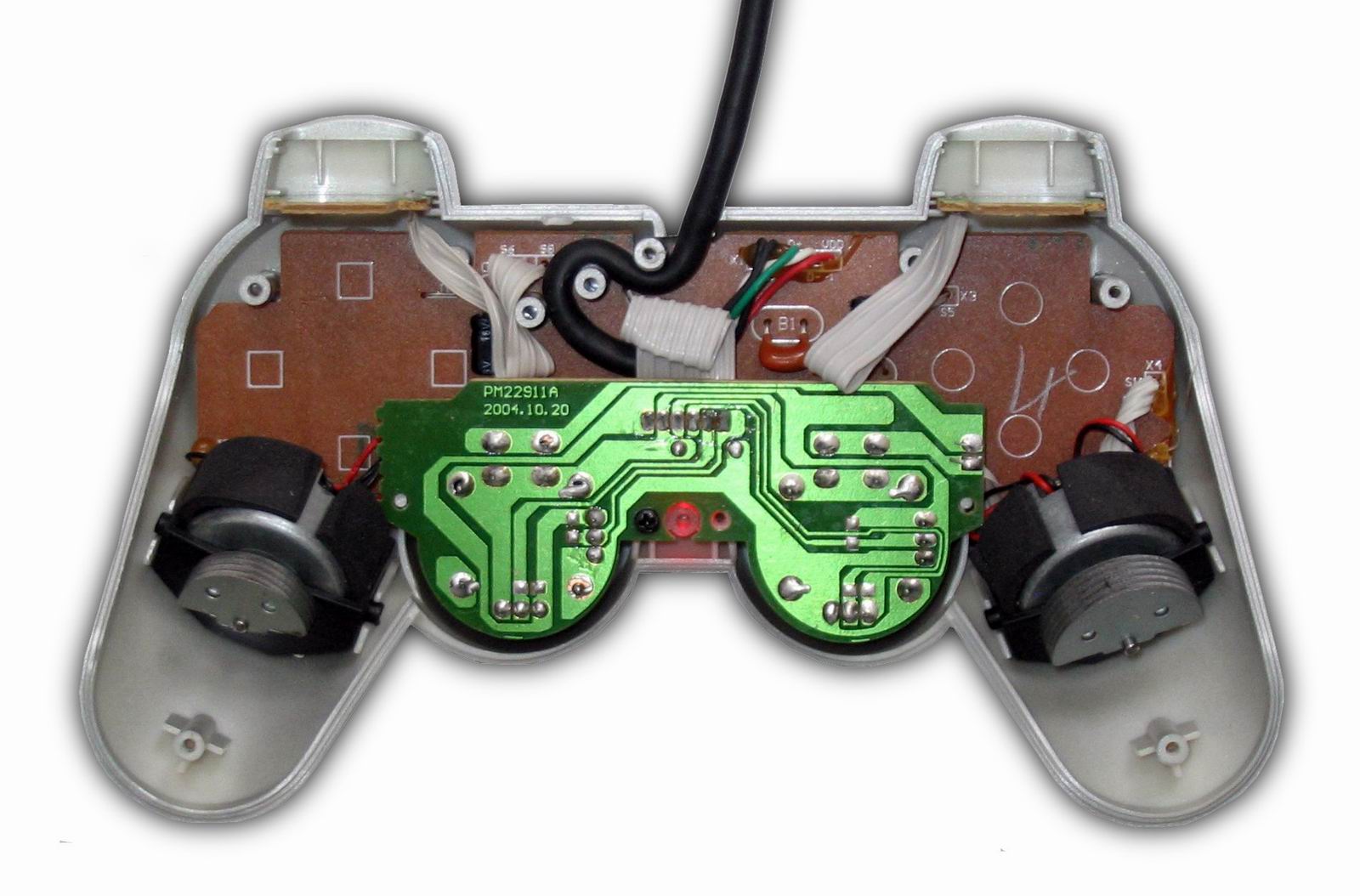
In Mobiltelefonen werden seit vielen Jahren Aktuatoren eingesetzt, bei denen ein Motor eine Masse rotieren lässt (Eccentric Rotation Mass Actuator). Ebenfalls im Einsatz sind Aktuatoren, bei denen ein Gewicht durch Magnetfelder in Schwingungen versetzt wird (Linear Resonant Aktuator). Die letztere Variante besitzt den Vorteil, dass sie wesentlich schneller und auch intensiver arbeitet. Die gravierenden Nachteile dieser beiden Aktuatorentypen sind zum einen ein höheres Gewicht und zum anderen kürzere Lebensdauern aufgrund des mechanischen Verschleißes.
Einen ähnlichen Effekt wie bei Linear Resonant Aktuatoren erreicht man durch Piezo-Aktuatoren. Auch in diesem Fall wird ein Gewicht bewegt, welches die Kraftübertragung auf den Finger erfolgen lässt. Sie haben im Vergleich zu mechanischen Vibrationsantrieben die wesentlichen Vorteile, dass sie kleiner sind, nahezu lautlos arbeiten und eine um das 80fache geringere Reaktionszeit besitzen. Aufgrund der geringeren Größe ist allerdings auch der Wirkungsgrad geringer, sodass der haptische Effekt schwächer ausfällt. Weitere Nachteile sind eine doppelt so hohe Stromaufnahme und ein dreifach so hoher Preis.
Bei gängigen vibrotaktilen Displays ist es zur Zeit nur schwer möglich, eine größere Fläche gleichmäßig mit einem taktilen Effekt auszustatten. Eine ideale Größe weisen Smartphones und Tablets aufgrund ihrer kompakten Bauweise auf.
Die gleichzeitige Darstellung verschiedener haptischer Effekte ist derzeit nicht uneingeschränkt möglich, da sich die Effekte schlimmstenfalls ausgleichen.
Die Multitouch-Technik lässt sich bei vibrotaktilen Displays nur schwer umsetzen. Das Problem besteht darin, dass die Vibrationen, die durch Aktuatoren erzeugt werden, nahezu das ganze Gerät zum Schwingen bringen. Eine Lokalisation wäre unter Einsatz mehrerer Aktuatoren theoretisch möglich, jedoch nicht präzise genug.

Pneumatisches Stimulation
Pneumatische Systeme geben dem Nutzer einen Widerstand vor, den er zu überwinden hat oder als “Grenze” wahrnehmbar ist. Diese Technologie wird derzeit zumeist im Zubehör von Videospielen genutzt.
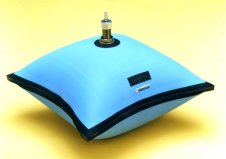
Eine Weste mit integrierter Pneumatik mit dem Namen "3rd Space" kann beispielsweise Kräfte nachbilden, die bei gegnerischen Treffern in einem First-Person-Shooter wirken. Ein Kompressor kontrolliert dazu acht verschiedene integrierte pneumatische Zellen, die die "Einschläge" verschiedener Stärken an verschiedenen Stellen des Rumpfes des Spielers produzieren können – je nachdem, was auf dem Bildschirm geschieht. Die "3rd Space"-Weste ist die abgespeckte Version eines Modells für den Einsatz in der Medizin, das von TN Games-Firmenchef Mark Ombrellaro entwickelt wurde. Der Gefäßchirurg arbeitete an einem Pilotprojekt der Texas Tech University, als ihm die Idee kam. Damals testete er verschiedene telemedizinische Geräte, die zur Behandlung von Kranken in US-Gefängnissen eingesetzt werden sollten. Hauptmethode war die Videokonferenz, vor Ort war jeweils nur eine Schwester. Ombrellaro frustrierte schnell, dass er hier seine Informationen immer nur aus zweiter Hand erfuhr: “Als Arzt nutze ich normalerweise meinen Tastsinn, um meine Patienten zu untersuchen." Deshalb beauftragte er ein Team von Ingenieuren, ein System zu entwickeln, mit dem taktile Informationen in Echtzeit übertragen werden können – vom Arzt zum Patienten und wieder zurück. Heraus kam ein Vorläufer der "3rd Space"-Weste mit 64 Kontaktpunkten allein am Unterleib. Ein Handschuh, den der Arzt trägt, hat wiederum acht Kontaktpunkte – diese werden verwendet, um den Patienten aus der Entfernung virtuell zu berühren und Antworten zu übermitteln. Zu Trainingszwecken ist die Verwendung dieser Technologie auch für Polizei und Militär vorstellbar.

Elektrotaktiles Stimulation
Bei einem Elektrotaktiles Feedback wird eine Reizentwicklung durch ein elektrostatisches Potential erreicht. Sensoren werden auf die Haut angebracht und geben kleine Stromstöße ab.
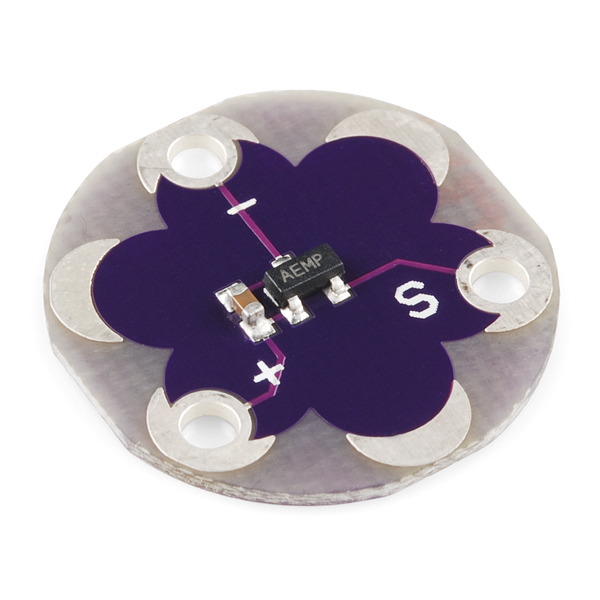
Neben der Methode, ein Display mit Aktuatoren zu bestücken, um Vibrationen hervorzurufen, ist es möglich die Oberflächensensibilität der Finger auf anderem Wege zu beeinflussen. Einen vielversprechenden Ansatz stellt das Produkt “Senseg Tixel” dar, welches elektrostatische Vibrationen auf einem Touchscreen erzeugt. Es wird hierbei ein transparentes Overlay über den Touchscreen gelegt und mittels Ladungsänderungen in dieser Schicht eine Coulomb-Kraft erzeugt, die es ermöglicht Oberflächentexturen und -konturen zu simulieren. Das Overlay wird von einem Hardware Controller angesteuert.
Laut dem finnischen Hersteller Senseg ist diese Technologie unabhängig von der Größe des Displays und zudem multitouchfähig. Es ist also möglich unterschiedliche Texturen und Konturen für mehrere Finger gleichzeitig spürbar zu machen. Ein Forschungsprojekt (siehe B4) nutzt einen ähnlichen Effekt. Hierbei wird aber nicht darauf gesetzt, eine Oberfläche mit einem haptischen Layer zu versehen, sondern den Nutzer mit einem Aktuator auszustatten. Über diesen werden entsprechende Mikroladungen beim Berühren einer Oberfläche erzeugt, wodurch nahezu jede Oberfläche mit Effekten versehen werden kann. Dieser flexible Ansatz findet auch Anwendung im Rahmen von Augmented Reality. Dazu wird ein Kamerasystem vorausgesetzt, welches die Objekte sowie den Finger des Benutzers überwacht und bei Berührung beliebige Textureffekte simuliert.
Für das elektrotaktile Feedback gibt es zwei technische Umsetzungsmöglichkeiten:
1) Die Oberfläche wird mit einer entsprechenden elektrotaktilen Schicht bestückt, welche die Oberflächensensibilität der Finger beeinflusst.
2) Der Mensch selbst trägt einen Aktuator, sodass das Feedback nicht auf ein einzelnes Objekt beschränkt ist.
Beiden Möglichkeiten setzen einen direkten Hautkontakt voraus. Eine Bedienung mit einem Handschuh ist folglich nicht möglich.
Temperaturinformationen
Auch durch verschiedene Temperaturinformationen kann ein taktiles Feedback erreicht werden. Diese Wahrnehmung ist von den subjektiven Voraussetzungen des Nutzers abhängig, sie unterliegt Täuschungen. Die Temperaturinformation besteht aus einer Kombination von Temperaturleitfähigkeit, Temperaturspeicherung und der Temperatur selbst. Aus diesen Punkten lassen sich Rückschlüsse auf das Material sowie auf die Temperaturdifferenz ziehen. Die Temperaturwahrnehmung erfolgt mit Warm und -Kaltsensoren an den freien Nervenenden der Haut. Diese sind im Bereich von 30-45°C bzw 15-35°C besonders sensitiv. Berührt die Haut eine körperfremden Oberfläche, wird infolge dessen eigene Körperwärme abgegeben oder es wird Temperatur aufgenommen. Der entstandene lokale Temperaturunterschied wird anschließend über die Thermorezeptoren registriert.